top of page



Puppet bot


Materials
 FUENTE DE PODER | 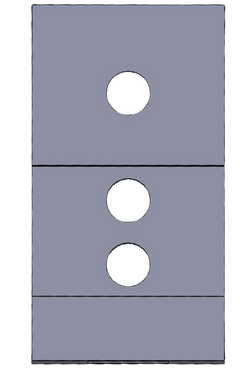 SOPORTES IMPRESOS3D PLA | 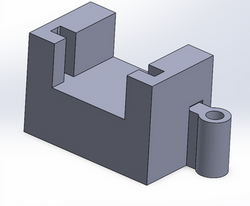 SOPORTE IMPRESO3D PLA |
|---|---|---|
 SOPORTE IMPRESOSOPORTE IMPRESO 3D |  SOPORTE IMPRESO3D PLA |  ESCUADRA ESQUINADAACERO |
 TABLA MDFMDF |  PINTURAPINTURA EN SPRAY CAFE |  INTERRUPTORESINTERRUPTORES DE CONTROL |
 ARDUINOUNO NANO |  REGLETA DE BORNESBORNES MACHO |  TORNILLOTORNILLO DE MADERA |
 CABLES DUPONTCABLE DUPONT H-H |  SERVOMOTORSERVOMOTORES |  Impresora 3D3D Printer |
 Sensor de SonidoEste sensor controla el baile |  Sensor de presencia infrarojoEste sensor ve cuando alguien le pasa la mano |
Prototype design
Connection diagram
The following image shows how PUPET BOT is connected
The diagram was made in Tinkercad.
On the left are the inputs, which are the sensors; in the middle is the control, which is the Arduino; and on the right are the actuators.


3D model Pupetbot
This image is the 3D model.
The image was created using SolidWorks.
3D printing
The model has several 3D printed parts; we used PLA for easier prototype creation.

.jpeg)
Power supply
We use the power supply to power the motors and the Arduino.

bottom of page