top of page



Puppet bot


Materiales
 FUENTE DE PODER |  SOPORTES IMPRESOS3D PLA | 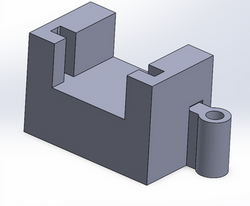 SOPORTE IMPRESO3D PLA |
|---|---|---|
 SOPORTE IMPRESOSOPORTE IMPRESO 3D |  SOPORTE IMPRESO3D PLA |  ESCUADRA ESQUINADAACERO |
 TABLA MDFMDF |  PINTURAPINTURA EN SPRAY CAFE |  INTERRUPTORESINTERRUPTORES DE CONTROL |
 ARDUINOUNO NANO |  REGLETA DE BORNESBORNES MACHO |  TORNILLOTORNILLO DE MADERA |
 CABLES DUPONTCABLE DUPONT H-H |  SERVOMOTORSERVOMOTORES |  Impresora 3D3D Printer |
 Sensor de SonidoEste sensor controla el baile |  Sensor de presencia infrarojoEste sensor ve cuando alguien le pasa la mano |
Diseño del prototipo
Diagrama de conexión
La siguiente imagen muestra como esta conectado PUPET BOT
El diagrama se hizo en Tinkercad.
Del lado izquierdo están las entradas que son los sensores, en medio está el control que es el Arduino y a la derecha están los actuadores


Modelo 3D Pupetbot
Esta imagen es el modelo 3D.
La imagen se hizo SolidWorks
Impresiones 3D
El modelo tiene varias piezas impresas en 3D utilizamos PLA para mayor facilidad de los portotypos

.jpeg)
Fuente de poder
Utilizamos la fuente de poder para alimentar los motores y el arduino

bottom of page